Hi I am veritably new to CAN communication now I am working on transmitting and entering data between 2 RA2A1 MCUs but I do not know how to configure the CAN configuration on the alternate board. I have previously tested the ...Read more
Hi
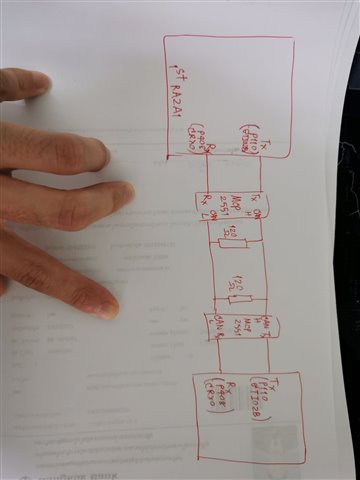
I am veritably new to CAN communication now I am working on transmitting and entering data between 2 RA2A1 MCUs but I do not know how to configure the CAN configuration on the alternate board. I have previously tested the circle- reverse mode on the first board, it’s working OK , but when I connect tx and rx of the first board to the alternate board, it wasn’t working. Here is my configuration.
and then are the lines that I used to flash into the first board and alternate board, thank you in advance.
Read less
Have you added the CGC driver, and started the Main Oscillator before calling R_CAN_Open()? err = R_CGC_Open (&g_cgc0_ctrl, &g_cgc0_cfg); if (FSP_SUCCESS != err) { __BKPT(0); //TODO better error handling } err = R_CGC_ClockStart (&g_cgc0_ctrl, CGC_CLOCK_MAIN_OSC, NULL); if (FSP_SUCCESS !Read more
Have you added the CGC driver, and started the Main Oscillator before calling R_CAN_Open()?
err = R_CGC_Open (&g_cgc0_ctrl, &g_cgc0_cfg);
if (FSP_SUCCESS != err)
{
__BKPT(0); //TODO better error handling
}
err = R_CGC_ClockStart (&g_cgc0_ctrl, CGC_CLOCK_MAIN_OSC, NULL);
if (FSP_SUCCESS != err)
{
__BKPT(0); //TODO better error handling
}
do
{
err = R_CGC_ClockCheck(&g_cgc0_ctrl, CGC_CLOCK_MAIN_OSC);
}while(FSP_ERR_NOT_STABILIZED == err);
if (FSP_SUCCESS != err)
{
__BKPT(0); //TODO better error handling
}
/* Initialize CAN module */
See lesserr = R_CAN_Open(&g_can0_ctrl, &g_can0_cfg);
/* Error trap */
if(FSP_SUCCESS != err)
{
__BKPT(0); //TODO better error handling
}